





Разработка модели грузового магнитолевитационного терминала

- Авторы: Костенко В.В.1, Белых Н.С.1, Четчуев М.В.1, Шепель А.С.1, Федоров В.П.1
-
Учреждения:
- Петербургский государственный университет путей сообщения Императора Александра I
- Выпуск: Том 3, № 3 (2017)
- Страницы: 39-53
- Раздел: Оригинальные статьи
- URL: https://journals.eco-vector.com/transsyst/article/view/8009
- DOI: https://doi.org/10.17816/transsyst20173339-53
- ID: 8009
Цитировать

Аннотация
На основании схем грузовых магнитолевитационных станций, разработанных специалистами кафедры «Железнодорожные станции и узлы» ПГУПС, и технологии транспортировки грузов на дискретно-непрерывных принципах создана модель, позволяющая производить динамические эксперименты для определения существенных параметров проектирования и показателей работы магнитолевитационных терминалов.
Цель: Определение зависимостей основных эксплуатационных параметров грузовых терминалов, необходимых для их проектирования и выбор рациональной производительности основных элементов и устройств.
Метод: Для решения этой задачи предлагается использовать метод имитационного моделирования, по средствам программного комплекса AnyLogic.
Результаты: Разработан технологический алгоритм грузовой станции, на основании которого в программной среде AnyLogic российской компании The AnyLogic Company, построена имитационная модель и получены необходимые отчётные данные – потребное количество и производительность погрузочно-выгрузочного оборудования, годовой грузооборот терминала, среднее время нахождения платформ на станции и непроизводительные простои магнитолевитационных платформ.
Практическая значимость: Верификация модели показала, что предложенный метод имитационного моделирования позволяет определить и обосновать искомые параметры грузовых терминалов магнитолевитационных линий, что обеспечит рациональное расходование средств на их строительство и требуемую перерабатывающую способность.
Полный текст
Введение
В современном мире задачам в области магнитной левитации уделяется повышенное внимание, что определяется преимуществами этого инновационного вида транспорта. Основными из них являются отсутствие прямого механического взаимодействия подвижного состава с путевой структурой, высокие скорости движения, экологичность.
По информации центра инновационного развития ОАО «РЖД», к 2030г. компания может создать собственный поезд на основе магнитной левитации. В настоящее время в России активно изучается возможность строительства дороги с использованием магнитной левитации, так например, сотрудниками института экономического развития ОАО «РЖД» совместно с коллегами из Петербургского университета путей сообщения и ПАО «Ленгипротранс» разрабатывается возможный маршрут транспортной линии на основе магнитной левитации Усть-Луга – Белый Раст [1], протяженностью 720 км. Аналогичный проект существует и для порта Бронка со строительством магнитолевитационной линии между терминалом Бронка и Гатчиной [1].
В системе магнитолевитационного транспорта устанавливается тенденция специализации линий по роду движения на грузовое и пассажирское [2, 3, 4], при этом для грузовых перевозок наиболее перспективным является контейнерное магнитолевитационное сообщение. Для этого рода сообщений линии должны иметь в обоих концах терминалы, которые будут выполнять начально-конечные грузовые операции, а также заниматься текущим обслуживанием и ремонтом подвижного состава.
1. Принципы имитационного моделирования магнитолевитационного терминала
При большой поточности транспортировки на линиях магнитолевитационного транспорта [5, 6], станции расположенные на таких линиях должны обладать соответствующей перерабатывающей способностью. Поэтому организация транспортировки грузов в контейнерных магнитолевитационных транспортных системах (МЛТС) будет происходить по принципам, которые должны иметь промежуточное положение между рельсовыми системами с дискретным движением объединенных в поезда транспортных единиц и системами постоянного перемещения грузов, такими как, конвейерами, трубопроводами, канатными дорогами и т.п. Таким образом, контейнерные МЛТС являются дискретно-непрерывными, что должно принято к сведению при разработке принципиальных схем объектов инфраструктуры и их технологии.
Для того чтобы построить первые линии, использующие магнитную левитацию, необходимо решить ряд технических и организационных вопросов, которые позволят организовать технологический процесс. При решении поставленных задач использовался наиболее подходящий метод расчета транспортных систем в данном случае – имитационное моделирование (ИМ) [7-11].
Применение ИМ обусловлено следующими преимуществами:
- Имитационные модели позволяют найти решение задачи, когда аналитическое моделирование и линейное программирование не способно на это;
- Структура имитационной модели естественным образом отображает структуру моделируемой системы;
- Имитационные модели позволяет отслеживать все объекты системы, учтенные в выбранном уровне абстракции;
- Возможно визуализировать модельный эксперимент во времени.
Существует три подхода к ИМ: системная динамика, дискретно-событийное и агентное моделирование. Каждый метод применяется в некотором диапазоне уровней абстракции. Системная динамика предполагает очень высокий уровень абстракции и используется для стратегического моделирования. Дискретно-событийное моделирование поддерживает средний и низкий уровни абстракции. Между ними находятся агентные модели, которые могут быть как очень детализированными, когда агенты представляют физические объекты, так и предельно абстрактные, когда с помощью агентов моделируются конкурирующие компании или правительства государств. Для моделирования магнитолевитационного терминала использовался агентный и дискретно-событийный подходы, которые часто используются в моделировании транспортных систем. Например, каждая платформа, прибывающая в терминал, является агентом со своим набором индивидуальных характеристик (наличие/отсутствие неисправности, номер позиции выгрузки/погрузки и др.). Процесс передвижения платформ по терминалу задан дискретно-событийными элементами (рис. 1): Move To (движение до определенной точки), Delay (остановка/ожидание), Queue (очередь) и т.д.
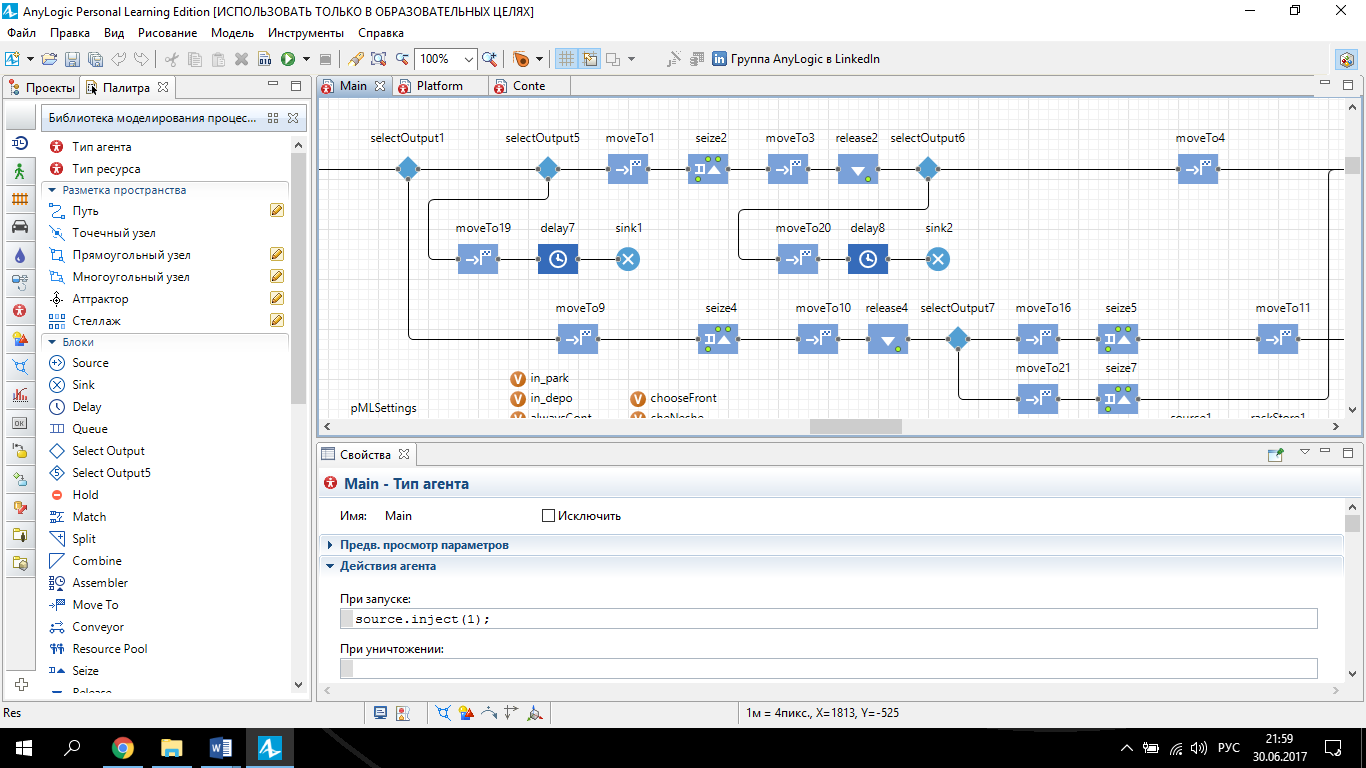
Рис. 1. Участок логики с дискретно-событийными элементами
Создать такую достаточно сложную модель как магнитолевитационный терминал с помощью готовых элементов логики и соединением их друг с другом невозможно, поэтому для описания многих деталей процесса должен использоваться язык программирования Java. В частности, были созданы функции и переменные, а дополнительные элементы логики сопровождаются программным кодом.
2. Технология работы терминала магнитолевитационной линии
На рисунке 2 представлена принципиальная схема терминала оборота магнитолевитационных платформ, перевозящих контейнеры. Общий вариант технологии работы терминала без рассмотрения буферных зон (депо терминала и путей отстоя) заключается в трех этапах:
- Вход заявки в систему. По прибытию платформы проходят техническое обслуживание (ТО);
- Обработка заявки. Платформы двигаются на выгрузку, где портальные краны передают контейнер погрузчикам; затем происходит передвижение на погрузочные позиции и погрузка;
- Выход заявки из системы. В заключении платформы проходят ТО повторно перед отправлением на магистраль. Передвижение между путями осуществляется за счет трансбордеров, которые перемещают подвижной состав между параллельными путями. Так же на схеме присутствуют пути отстоя для платформ, ожидающих погрузки и депо для их ремонта.

Рис. 2. Схема грузового магнитолевитационного терминала
3. Результаты модельных экспериментов
Данная схема была перенесена в «мир моделей», по средствам программы AnyLogic [12]. Для моделирования этого объекта использовался агентный и дискретно-событийный подходы, которые подходят для моделирования транспортных систем. В модели присутствуют 2D, 3D (рис. 3) окна, а также окно сбора статистики (рис. 4).
Статистика зависит от тех параметров, которые исследователь задает перед запуском эксперимента, а именно:
- интервал поступления платформ на станцию с учётом его колебаний;
- интенсивность поступления контейнеров на терминал, подлежащих погрузке на платформы;
- количество погрузо-разгрузочных механизмов и их производительность;
- время на каждую элементарную операцию (передвижка с пути на путь, время на контроль технического состояния и т.п.).

Рис. 3. 3D окно
При динамической верификации модели (пример на рис. 4) были определены исходные параметры для функционирования магнитолевитационного терминала:
- время технического обслуживания – 1 минута;
- среднее время погрузки/выгрузки – 3 минуты;
- время движений трансбордера – от 1 до 2 минут (в зависимости от ширины междупутья);
- интервал прибытия платформ – 2,6 минуты;
- среднее время занятия ричстакера одним контейнером – 5 минут.

Рис. 4. Окно сбора статистики
При моделировании таких исходных данных получились следующие результаты:
- загруженность портальных кранов: на выгрузке – 34%, на погрузке – 39%;
- потребное количество погрузчиков: на выгрузке – 5 шт., на погрузке – 6 шт.;
- грузооборот за год – 371760 TEU;
- максимальное количество платформ, ожидающих погрузки – 3 шт.;
- среднее время нахождения каждой платформы на станции – 20 минут.
Заключение
Используя полученную модель магнитолевитационного терминала, можно оптимизировать следующие данные для дальнейшего проектирования:
- число параллельно работающих погрузочных и выгрузочных линий;
- потребное количество погрузочно-разгрузочных механизмов при заданной производительности;
- перерабатывающую способность терминала;
- производительный и непроизводительный простой магнитолевитационных платформ;
- потребный парк магнитолевитационных платформ на линии.
Об авторах
Владимир Васильевич Костенко
Петербургский государственный университет путей сообщения Императора Александра I
Автор, ответственный за переписку.
Email: docentkostenko@yandex.ru
к.т.н., доцент, доцент кафедры «Железнодорожные станции и узлы»
РоссияНикита Сергеевич Белых
Петербургский государственный университет путей сообщения Императора Александра I
Email: aktikin_be@icloud.com
студент факультета «Управление перевозками и логистика»
РоссияМаксим Владимирович Четчуев
Петербургский государственный университет путей сообщения Императора Александра I
Email: maxetion@mail.ru
к.т.н., доцент кафедры «Железнодорожные станции и узлы»
РоссияАлександр Сергеевич Шепель
Петербургский государственный университет путей сообщения Императора Александра I
Email: alexandr.wm@yandex.ru
ассистент кафедры «Железнодорожные станции и узлы»
РоссияВладимир Петрович Федоров
Петербургский государственный университет путей сообщения Императора Александра I
Email: zhdsu@yandex.ru
доцент, доцент кафедры «Железнодорожные станции и узлы»
РоссияСписок литературы
- Иголкин Г. В. Оптимизация параметров пролетного строения под магнитолевитационный транспорт, предназначенный для контейнерных перевозок / Г. В. Иголкин, И. О. Потапов // Сборник трудов LXXVI юбил. Всерос. науч.-технич. конф. «Транспорт: проблемы, идеи, перспективы». -С-Пб: ФГБОУ ВО ПГУПС, 2016. - 403 с.
- Зайцев А. А. Контейнерный мост Санкт-Петербург - Москва на основе магнитной левитации / А. А. Зайцев, Ю. Ф. Антонов // Магнитолевитационные транспортные системы и технологии: труды 2-й Междунар. научн. конф., Санкт-Петербург, 17-20 июня 2014. - Киров: МЦНИП, 2014. - С. 11-23.
- Rose C. R., Peterson D. E., Leung E. M. «Implementation of Cargo MagLev in the United States». - URL: http://www.researchgate.net/publication/228994479_Implementation_of_cargo_ MagLev_in_the_United_States (25.05.2017)
- Костенко В. В. Сравнительная характеристика высокоскоростных пассажирских наземных линий на основе системы «колесо-рельс» и «магнитный подвес» / В. В. Костенко, М. В. Четчуев, В. П. Федоров // Магнитолевитационные транспортные системы и технологии: труды 1 -й Междунар. научн. конф., Санкт-Петербург, 29-31 октября 2013. - СПб: ООО PUDRA, 2013. - С. 95-98.
- Антонов Ю. Ф. Магнитолевитационная транспортная технология / Ю. Ф. Антонов, А. А. Зайцев; под ред. В. А. Гапановича. - М.: ФИЗМАТЛИТ, 2014. - 476 с.
- Зайцев А. А. Магнитолевитационные транспортные системы и технологии / А. А. Зайцев // Железнодорожный транспорт. - 2014. - № 5. - С. 69-73.
- Шепель А. С. Определение зависимостей между параметрами станционных горловин / А. С. Шепель // Сборник трудов LXXVI юбил. Всерос. науч. -технич. конф. «Транспорт: проблемы, идеи, перспективы». - СПб: ФГБОУ ВО ПГУПС, 2015. - С. 245-251.
- Моделирование работы транспортных систем: инструкция пользователя / Ю. А. Бобров, В. А. Лосева. - СПб.: ОАО «Ленгипротранс», 2008. - 45 с.
- Войцеховская В. Программные комплексы, разработанные специалистами ОАО «Ленгипротранс» / В. Войцеховская, Ю. Бобров // Транспорт Российской Федерации. - СПб.: Т-ПРЕССА, 2009. - № Прил. - С. 58-59
- Козлов П. Оценка инфраструктурных транспортных проектов методом моделирования / П. Козлов, А. Александров // Транспорт Российской Федерации. - СПб.: Т-ПРЕССА, 2006. - №5. - С. 43-44.
- Расчет железнодорожных станций и узлов с помощью имитационной системы ИСТРА. - URL http://www.trans-expert.net/istra.htm (22.05.2017).
- Каталевский Д. Ю. Основы имитационного моделирования и системного анализа в управлении. - М.: Издательский дом «Дело» РАНХиГС, 2015. - 496с.
Дополнительные файлы

