





Development of model of freight magnetic levitation terminal

- Authors: Kostenko V.V.1, Belykh N.S.1, Chetchuev M.V.1, Shepel A.S.1, Fedorov V.P.2
-
Affiliations:
- Emperor Alexander I St. Petersburg State Transport University
- Emperor Alexander I Petersburg State Transport University
- Issue: Vol 3, No 3 (2017)
- Pages: 39-53
- Section: Original papers
- URL: https://journals.eco-vector.com/transsyst/article/view/8009
- DOI: https://doi.org/10.17816/transsyst20173339-53
- ID: 8009
Cite item

Abstract
On the basis of schemes of cargo magnetic levitation stations, developed by the specialists of the Department of "Railway stations and junctions" of Emperor Alexander I St. Petersburg State Transport University, and the technology to transport goods over discrete-continuous principles created a model that allows to perform dynamic experiments to identify significant design parameters and performance of magnetic levitation terminals.
Goal: To identify dependencies of key operating parameters of freight terminals required for their design and choice of rational performance of basic elements and devices.
Method: In order to solve this problem, it is proposed to use a simulation method by means of a programme AnyLogic.
Results: The technological algorithm of a freight station was developed, on the basis of which in the software environment of AnyLogic of the Russian company “the AnyLogic Company” the simulation model was built, and necessary report data were obtained – the required number and capacity of loading and unloading equipment, annual turnover of terminal, the average time spent on the platforms at the station and unproductive downtime of magnetic levitation platforms.
Practical importance: The model verification has shown that the proposed simulation method allows to determine and justify the required parameters of the freight terminal of magnetic levitation lines, which will ensure rational spending of the funds for their construction and required processing ability.
Full Text
Introduction
In the today’s world, the magnetic levitation issues are given increased attention, which is determined by benefits of this cutting-edge mode of transport. The core benefit consists in the absence of direct mechanical contact between rolling stock and the track structure, high traffic speeds and sustainability.
According to the JSC “RZD” Centre for Innovative Development, by 2030 the holding may construct its own magnetic levitation technology-based train. At present, Russia is arduously studying the possibility of construction of magnetic levitation railway. Thus, the representatives of RZD’s Institute of Economy and Transport Development together with their colleagues from Emperor Alexander I St. Petersburg State Transport University and PJSC “Lengiprotrans” are now working out possible route of magnetic levitation transport line Ust-Luga – Bely Rast [1], with the length of 720 km. The same project is considered for the port Bronka with the projected maglev line between Bronka terminal and Gatchina [1].
In the system of maglev transport, there grows a tendency to divide lines, in accordance with the type of the subject transported, into freight and passenger ones [2, 3, 4], whereby the most promising for freight transportation is container maglev transport. For this kind of transportation the lines should have terminals on their both ends, which will perform initial and final freight operations as well as provide technical maintenance and repair of rolling stock.
1. Principles of Imitation Simulation of Magnetic Levitation Terminal
Dealing with a heavy transportation flow on maglev lines [5, 6] the stations on these lines should have a required processing capacity. Therefore, the organisation of goods transportation in container maglev transport systems (MLTS) will be done accordance with the principles which should have intermediate position between rail systems with discrete traffic of transport units (trains) and the system of constant freight transportation, such as conveyors, pipelines, ropeways, etc. Thus, container MLTS are of discrete and uninterruptable type, which is to be taken into account while developing schemes of infrastructure objects and their technologies.
In order to build first lines using magnetic levitation, a number of technical and organisational issues should be settled, which will enable us to organise technological process. While solving the set tasks, the most suitable in this case method of calculation of transport systems was used – the imitation simulation (IS) [7-11].
The application of the IS is justified by the following advantages:
- Imitation models enable us to find the solution of a task when analytical simulation and linear programming are incapable of it;
- Structure of the imitation model naturally reflects the structure of the simulated system;
- Imitation models enable us to track all objects of the system taken into account in the selected level of abstraction;
- Possibility of visualisation of a model experiment in the time.
There three approaches to the IS: system dynamics, discrete-event and agent-based simulations. Each of the methods is applied in a range of abstraction levels. System dynamics predisposes a very high level of abstraction and is used for strategic simulation. Discrete-event supports a medium and a low level of abstraction. Between them, there are agent-based models, which may be both highly detailed, when the agents represent physical objects, and maximally abstract, when by virtue of agents competing companies or governments are simulated. For simulation of a maglev terminal the agent-based and discrete-event approaches were used, which are frequently used in transport systems simulations. For example, every platform arriving in a terminal is considered a agent possessing its own range of characteristics (presence/absence of failures, number of position of unloading/loading, and others). The process of moving platforms along the terminal is specified by discrete-event elements (pic. 1): Move to (moving to the determined point), Delay (stop/waiting), Queue (line) and others.
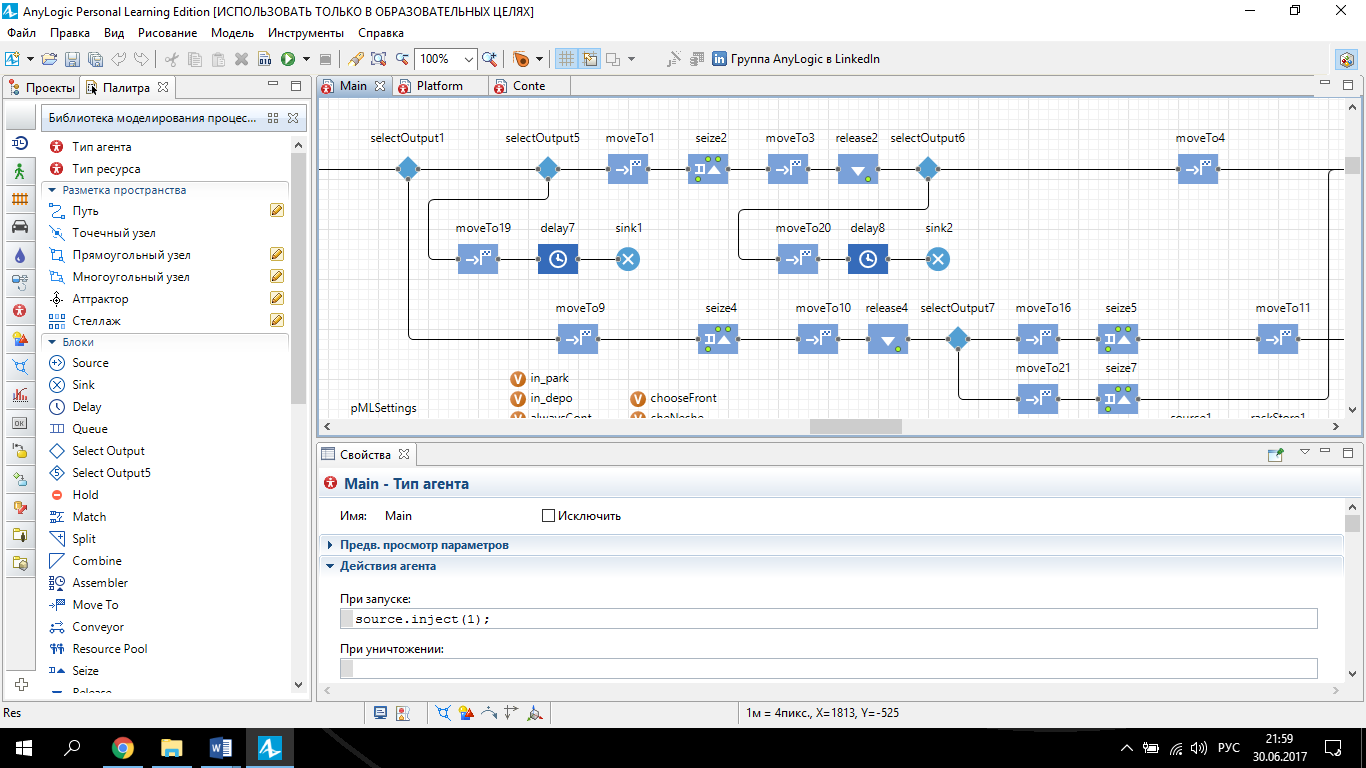
Pic. 1. Section of logics with discrete-event elements
To create such a sophisticated model as a maglev terminal by virtue of prepared elements of logics and connecting them to each other is impossible, therefore for description of many details of the process the programming language Java should be used. In particular, functions and variables were set, whereas additional elements of logics are followed by a programme code.
2. Technology of Operation of Maglev Terminal Line
The picture 2 shows scheme of terminal processing of maglev platforms carrying containers. Common variant of the technology of terminal performance without considering buffer zones (terminal depots and refuge siding) consists of three stages:
- Entrance of the request into the system. On arrival, platforms undergo technical maintenance (TM);
- Processing of the request. Platforms are moved to the unloading site, where port cranes carry the container to a loader; then comes transportation to the loading site, and finally loading process;
- Request output. In the end, platforms again undergo TM before being sent to the line. Transportation between the lines is carried out by means of traverser, which moves rolling stock between parallel In a scheme there are also refuge sidings for platforms waiting to be loaded, and depots for repair.

Pic. 2. Scheme showing freight maglev terminal
3. Results of Model Experiments
The scheme was taken into “the world of models” by means of the programme AnyLogic [12]. For simulation of this object, the agent-based and discrete-event approaches were used, which are suitable for simulation of transport systems. In the model, there are 2D and 3D windows (pic. 3) and also a window for collection of statistics (pic. 4).
The statistics depends upon those parameters which are set by a researcher before staring the experiment, namely:
- interval of arrival of the platforms at the station, taking into account its fluctuation;
- intensity of arrival of containers at the terminal with their further loading onto platforms;
- number of loading and unloading mechanisms and their capacity;
- time spent for each single operation (moving from one line onto another, time for control of technical state, and others).

Pic. 3. 3D window
During dynamic verification of the model (example in pic. 4) source parameters for maglev terminal functioning were defined:
- time of technical maintenance – 1 minute;
- average time for loading/unloading – 3 minutes;
- time spent for traverser – from 1 to 2 minutes (depending on the width of the intertrack space);
- platform arrival interval – 2.6 minutes;
- average time spent for one container by a reach stacker – 5 minutes.

Pic. 4. Window for collection of statistics
Simulation of these data resulted in the following:
- load of port cranes:34 per cent at unloading, 39 per cent at loading;
- necessary number of loaders: 5 at unloading, 6 at loading;
- cargo turnover per year – 371760 TEU;
- maximum number of platforms waiting to be loaded – 3;
- average time spent by each platform at the station– 20 minutes.
Conclusion
Using the acquired model of the maglev terminal we may optimise the following data for further design:
- number of simultaneously working loading/unloading lines;
- necessary number of loading/unloading mechanisms at a given capacity;
- processing capacity of the terminal;
- production and non-production downtime of maglev platforms;
- required yard of maglev platforms on the line;
About the authors
Vladimir V. Kostenko
Emperor Alexander I St. Petersburg State Transport University
Author for correspondence.
Email: docentkostenko@yandex.ru
Ph. D. (Tech.), assistant professor, associate professor of the department «Railway stations and junctions»
Russian FederationNikita S. Belykh
Emperor Alexander I St. Petersburg State Transport University
Email: aktikin_be@icloud.com
student of the faculty «Management of transportation and logistics»
Russian FederationMaksim V. Chetchuev
Emperor Alexander I St. Petersburg State Transport University
Email: maxetion@mail.ru
Ph. D. (Tech.), associate professor of the department «Railway stations and junctions»
Russian FederationAlexander S. Shepel
Emperor Alexander I St. Petersburg State Transport University
Email: alexandr.wm@yandex.ru
assistant of the department «Railway stations and junctions»
Russian FederationVladimir P. Fedorov
Emperor Alexander I Petersburg State Transport University
Email: zhdsu@yandex.ru
assistant professor, associate professor of the department «Railway stations and junctions»
Russian FederationReferences
- Иголкин Г. В. Оптимизация параметров пролетного строения под магнитолевитационный транспорт, предназначенный для контейнерных перевозок / Г. В. Иголкин, И. О. Потапов // Сборник трудов LXXVI юбил. Всерос. науч.-технич. конф. «Транспорт: проблемы, идеи, перспективы». -С-Пб: ФГБОУ ВО ПГУПС, 2016. - 403 с.
- Зайцев А. А. Контейнерный мост Санкт-Петербург - Москва на основе магнитной левитации / А. А. Зайцев, Ю. Ф. Антонов // Магнитолевитационные транспортные системы и технологии: труды 2-й Междунар. научн. конф., Санкт-Петербург, 17-20 июня 2014. - Киров: МЦНИП, 2014. - С. 11-23.
- Rose C. R., Peterson D. E., Leung E. M. «Implementation of Cargo MagLev in the United States». - URL: http://www.researchgate.net/publication/228994479_Implementation_of_cargo_ MagLev_in_the_United_States (25.05.2017)
- Костенко В. В. Сравнительная характеристика высокоскоростных пассажирских наземных линий на основе системы «колесо-рельс» и «магнитный подвес» / В. В. Костенко, М. В. Четчуев, В. П. Федоров // Магнитолевитационные транспортные системы и технологии: труды 1 -й Междунар. научн. конф., Санкт-Петербург, 29-31 октября 2013. - СПб: ООО PUDRA, 2013. - С. 95-98.
- Антонов Ю. Ф. Магнитолевитационная транспортная технология / Ю. Ф. Антонов, А. А. Зайцев; под ред. В. А. Гапановича. - М.: ФИЗМАТЛИТ, 2014. - 476 с.
- Зайцев А. А. Магнитолевитационные транспортные системы и технологии / А. А. Зайцев // Железнодорожный транспорт. - 2014. - № 5. - С. 69-73.
- Шепель А. С. Определение зависимостей между параметрами станционных горловин / А. С. Шепель // Сборник трудов LXXVI юбил. Всерос. науч. -технич. конф. «Транспорт: проблемы, идеи, перспективы». - СПб: ФГБОУ ВО ПГУПС, 2015. - С. 245-251.
- Моделирование работы транспортных систем: инструкция пользователя / Ю. А. Бобров, В. А. Лосева. - СПб.: ОАО «Ленгипротранс», 2008. - 45 с.
- Войцеховская В. Программные комплексы, разработанные специалистами ОАО «Ленгипротранс» / В. Войцеховская, Ю. Бобров // Транспорт Российской Федерации. - СПб.: Т-ПРЕССА, 2009. - № Прил. - С. 58-59
- Козлов П. Оценка инфраструктурных транспортных проектов методом моделирования / П. Козлов, А. Александров // Транспорт Российской Федерации. - СПб.: Т-ПРЕССА, 2006. - №5. - С. 43-44.
- Расчет железнодорожных станций и узлов с помощью имитационной системы ИСТРА. - URL http://www.trans-expert.net/istra.htm (22.05.2017).
- Каталевский Д. Ю. Основы имитационного моделирования и системного анализа в управлении. - М.: Издательский дом «Дело» РАНХиГС, 2015. - 496с.
Supplementary files

